HC-SR04 Ultrasonic Distance Sensor
Complete Tutorial: Non-Contact Distance Measurement
1. Introduction
The HC-SR04 is one of the most popular distance sensors for hobbyists and makers. It uses ultrasonic sound waves (40kHz) to measure distances from 2cm to 400cm without physical contact.
The sensor works like a bat's echolocation: it emits an ultrasonic pulse, waits for the echo, and calculates distance based on the time it took for the sound to return.
📦 Key Features
- Range: 2cm to 400cm (4 meters)
- Accuracy: ±3mm
- Measuring angle: ~15°
- Works at 5V only
2. Technical Specifications
| Parameter | Specification |
|---|---|
| Operating Voltage | 5V DC |
| Operating Current | 15mA |
| Ultrasonic Frequency | 40kHz |
| Measuring Range | 2cm – 400cm |
| Accuracy | ±3mm |
| Measuring Angle | ~15° cone |
| Trigger Input | 10µs HIGH pulse |
How It Works
- Send a 10µs HIGH pulse to the TRIG pin
- Sensor emits 8 ultrasonic bursts at 40kHz
- ECHO pin goes HIGH and stays HIGH until echo returns
- Measure ECHO pulse width to calculate distance
💡 Distance Formula
Distance (cm) = (Pulse Duration × 0.0343) / 2
Speed of sound = 343 m/s = 0.0343 cm/µs. Divide by 2 for round-trip.
3. Wiring Guide
| HC-SR04 Pin | Description | Arduino Uno | ESP32 (5V) |
|---|---|---|---|
| VCC | Power (5V only) | 5V | VIN/5V |
| TRIG | Trigger Input | Pin 9 | GPIO 5 |
| ECHO | Echo Output | Pin 10 | GPIO 18* |
| GND | Ground | GND | GND |
*ESP32 is 3.3V - use a voltage divider on ECHO pin or use 3.3V-compatible ultrasonic sensor
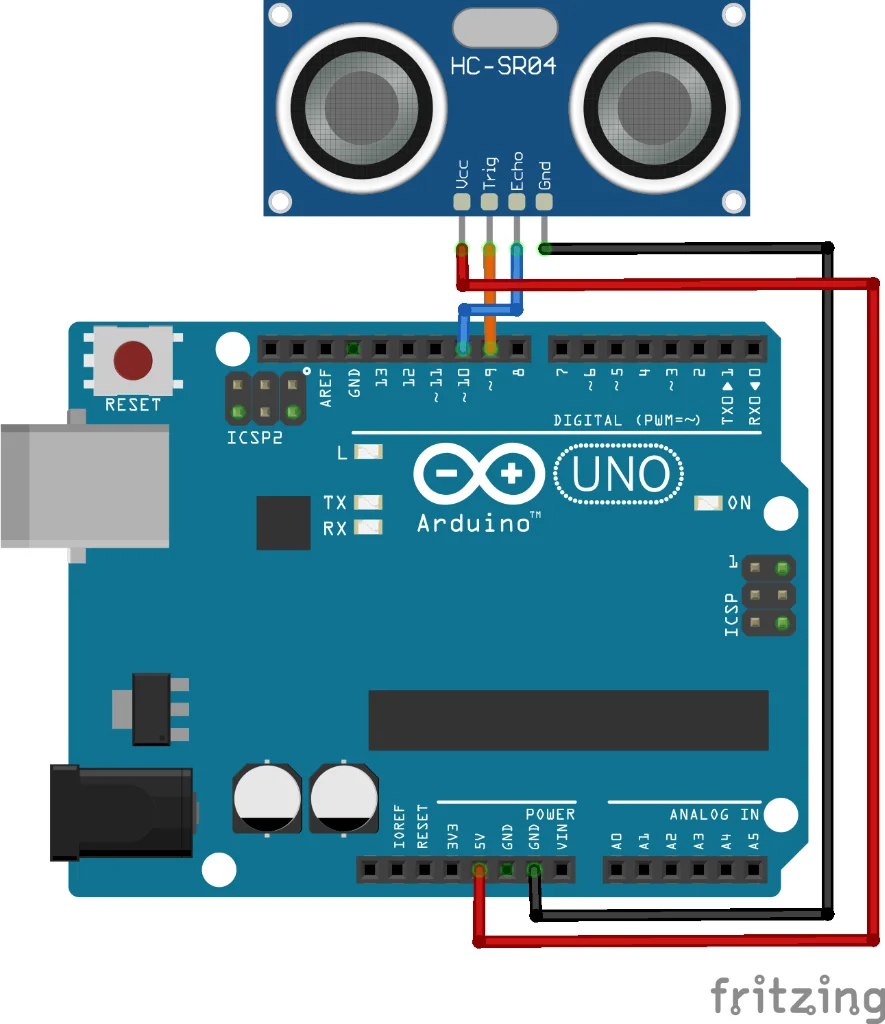
Figure 1: HC-SR04 wiring with Arduino Uno
4. Project: Distance Meter
Complete Code
const int trigPin = 9;
const int echoPin = 10;
void setup() {
Serial.begin(115200);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.println("HC-SR04 Distance Meter");
}
void loop() {
// Clear trigger pin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Send 10µs trigger pulse
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Measure echo pulse duration
long duration = pulseIn(echoPin, HIGH);
// Calculate distance
float distanceCm = duration * 0.0343 / 2;
// Validate reading
if (duration == 0 || distanceCm > 400) {
Serial.println("Out of range!");
} else {
Serial.print("Distance: ");
Serial.print(distanceCm, 1);
Serial.println(" cm");
}
delay(100);
}Median Filter for Stable Readings
float getMedianDistance(int samples) {
float readings[samples];
for (int i = 0; i < samples; i++) {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
long duration = pulseIn(echoPin, HIGH);
readings[i] = duration * 0.0343 / 2;
delay(10);
}
// Simple bubble sort
for (int i = 0; i < samples-1; i++) {
for (int j = 0; j < samples-i-1; j++) {
if (readings[j] > readings[j+1]) {
float temp = readings[j];
readings[j] = readings[j+1];
readings[j+1] = temp;
}
}
}
return readings[samples/2]; // Return median
}5. Applications
- Obstacle avoidance: Robots and autonomous vehicles
- Parking sensors: Reverse distance warning
- Liquid level: Non-contact tank level monitoring
- Proximity detection: Automatic doors, hand sanitizers
- Mapping: Simple LIDAR-like scanning with servo
6. Troubleshooting
Always reads 0 or timeout
- Check VCC is connected to 5V (not 3.3V)
- Verify TRIG and ECHO pin connections
Inconsistent readings
- Use median filter (see code above)
- Avoid soft or angled surfaces
- Add delay between measurements
Maximum range not achieved
- Target may be too small or angled
- Ensure clear line of sight
7. Summary
- Ultrasonic distance sensor (2-400cm range)
- Requires 5V power supply
- Distance = (pulse duration × 0.0343) / 2
- Use median filter for stable readings
- Not suitable for sound-absorbing materials