VL53L0X Time-of-Flight Laser Sensor
Complete Tutorial: Precision Laser Distance Measurement
1. Introduction
The VL53L0X is a Time-of-Flight (ToF) laser ranging sensor made by STMicroelectronics. Unlike ultrasonic sensors, it uses an invisible laser (940nm VCSEL) to measure distance with millimeter accuracy up to 2 meters.
ToF sensors measure the time it takes for light to travel to a target and back—at the speed of light! This makes them incredibly fast and accurate.
📦 Why Choose VL53L0X?
- High accuracy: ±3% typical
- Color-independent (works on any surface)
- Fast response: up to 50Hz
- Eye-safe Class 1 laser
- Tiny package and low power
2. Technical Specifications
| Parameter | Specification |
|---|---|
| Operating Voltage | 2.6V – 3.5V (module: 3.3V – 5V) |
| Interface | I2C (up to 400kHz) |
| I2C Address | 0x29 (default, changeable) |
| Measuring Range | Up to 2000mm (2 meters) |
| Accuracy | ±3% typical |
| Field of View | 25° cone |
| Laser Wavelength | 940nm (invisible infrared) |
| Current Consumption | ~20mA during ranging |
Ranging Modes
| Mode | Max Range | Speed |
|---|---|---|
| Default | 1.2m | ~30ms |
| Long Range | 2.0m | ~33ms |
| High Speed | 1.2m | ~20ms |
| High Accuracy | 1.2m | ~200ms |
💡 VL53L0X vs HC-SR04
VL53L0X: Laser, 2m range, I2C, 3.3V, color-independent
HC-SR04: Ultrasonic, 4m range, GPIO, 5V, affected by surface material
3. Wiring Guide
| VL53L0X Pin | Description | ESP32 | Arduino Uno |
|---|---|---|---|
| VIN | Power (3.3V-5V) | 3.3V | 3.3V |
| GND | Ground | GND | GND |
| SCL | I2C Clock | GPIO 22 | A5 |
| SDA | I2C Data | GPIO 21 | A4 |
| XSHUT | Shutdown (optional) | Any GPIO | Any Pin |
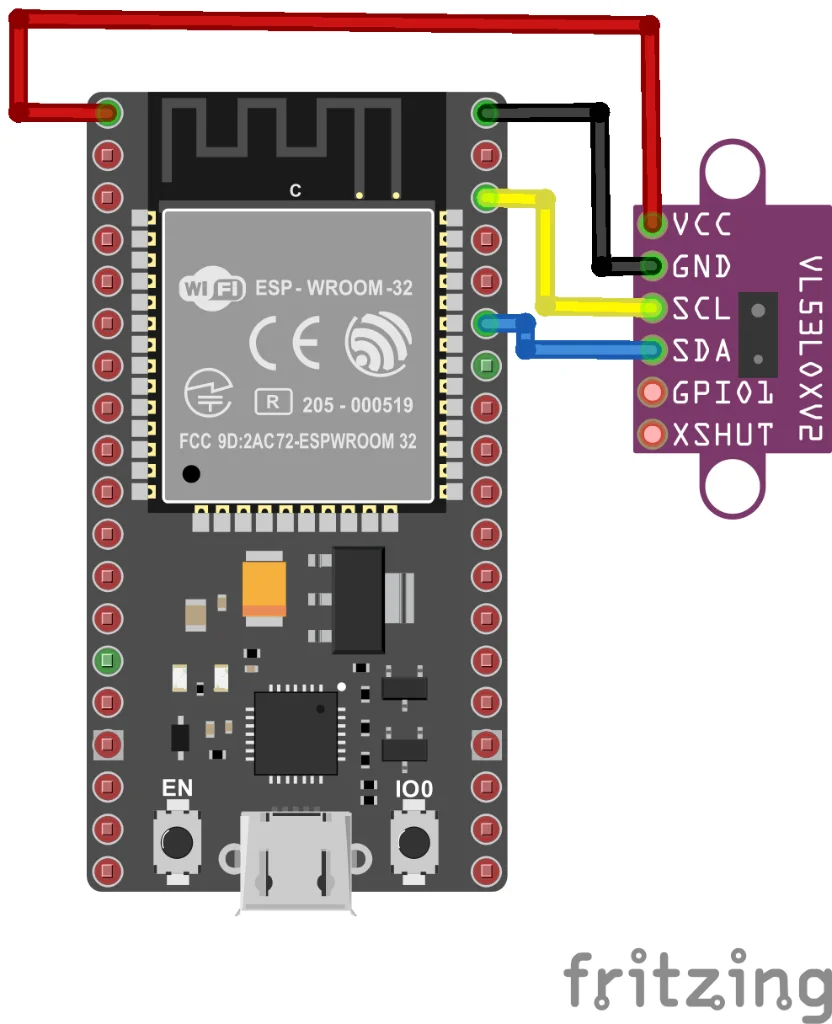
Figure 1: VL53L0X I2C wiring with ESP32
4. Project: Laser Distance Meter
Required Library
Install Adafruit VL53L0X via Arduino Library Manager.
Basic Distance Reading
#include "Adafruit_VL53L0X.h"
Adafruit_VL53L0X lox = Adafruit_VL53L0X();
void setup() {
Serial.begin(115200);
Serial.println("VL53L0X Laser Distance Meter");
if (!lox.begin()) {
Serial.println("ERROR: VL53L0X not found!");
while (1);
}
Serial.println("VL53L0X Ready!");
}
void loop() {
VL53L0X_RangingMeasurementData_t measure;
lox.rangingTest(&measure, false);
if (measure.RangeStatus != 4) { // 4 = out of range
Serial.print("Distance: ");
Serial.print(measure.RangeMilliMeter);
Serial.println(" mm");
} else {
Serial.println("Out of range");
}
delay(100);
}Continuous Mode (Faster)
#include "Adafruit_VL53L0X.h"
Adafruit_VL53L0X lox = Adafruit_VL53L0X();
void setup() {
Serial.begin(115200);
if (!lox.begin()) {
Serial.println("ERROR: Sensor not found!");
while (1);
}
// Start continuous ranging
lox.startRangeContinuous();
}
void loop() {
if (lox.isRangeComplete()) {
Serial.print("Distance: ");
Serial.print(lox.readRange());
Serial.println(" mm");
}
}5. Multiple Sensors
To use multiple VL53L0X sensors on the same I2C bus, use the XSHUT pin to change addresses:
- Connect each sensor's XSHUT to a different GPIO
- At startup, hold all XSHUT pins LOW
- Release one sensor, set its new address
- Repeat for each sensor
6. Applications
- Gesture sensing: Hand distance detection
- Autofocus: Camera focus assistance
- Robotics: Obstacle detection and navigation
- Drones: Altitude hold and landing
- 3D scanning: Simple object scanning
7. Troubleshooting
Sensor not detected
- Check I2C wiring (SDA, SCL)
- Verify I2C address with scanner (default: 0x29)
Always reads "out of range"
- Target may be too far (>2m)
- Target may be too reflective or transparent
8. Summary
- Time-of-Flight laser sensor (up to 2 meters)
- I2C interface, default address 0x29
- Color and surface independent
- Eye-safe Class 1 laser
- Use Adafruit VL53L0X library